电吉他连接mac book pro:
连接MBP设备Apogee Jam With Guitar Rig & Garage Band
IK Multimedia iRig HD 2 吉他和贝斯接口 RMB 890
需要注意的是,使用的时候不要把gain调得过高,那里是有指示灯的,如果闪红色,说明过载了,得调低一些,绿色就是正常。
连USB之前请把gain和音量都调到最低,连上后再进行调整,用完后也是一样,调到最低,再拔USB。这样可以保护自己的设备。
吉他40%,效果器10%,音箱50%

琴颈:
- 握把后上下滑动,检查边缘是否平滑
- 厚度是否适合手型,薄些的适合速弹
- 从尾部向琴头方向检查琴颈是否有变形,弯曲的情况
音色:
拾音器 单,双线圈
单: 清脆,有杂音 fender
双: 杂音小,浑厚 Gipson
Fender的美产标准款Telecaster和Stratocaster,应该是体验标准Fender音色最好的选择。
PRS Guitar:
Paul Reed Smith(簡稱 PRS)指的是美國電吉他廠牌及其創始人(Paul Reed Smith, 1956年2月18日 - )創立於西元 1985 年。
PRS 融合了電吉他界中的二大巨頭:Gibson Les Paul 及 Fender Stratocaster 的特長,將它們合而為一。在 PRS 上面你可以透過不同段數的切換得到 Gibson 的雙線圈溫暖厚實 tone 與 Fender 的單線圈清亮 tone,可以說是非常實用划算的電吉他。
Gibson Les Paul

Fender Stratocaster

主力型號 Custom 系列,琴身由桃花心木背板 + 楓木面板製成,並可依需求選擇有/無搭載搖座的款式。
PRS Custom 24 韩产比印尼产要好些

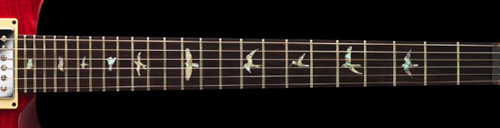
PRS 外觀上最大的特色就是指板上的飛鳥雕刻(Bird inlay)每一格的品種皆不同,表列如下:
Custom、Standard、ME、CE、McCarty、Singlecut、Santana 等等型號的 Bird inlay 上基本上都是這種
513代表5个拾音器与13种音色。513桃花心木版本则是紫檀木“原版”513的升级版本。它采用新的桃花心木琴颈,紫檀木指板,改良的硬件以及PRS专利的拾音器系统利用五个单线圈拾音器(双单双)提供包括从现代和到古典的各种音色共计13种。其他配置包括25 1/4英寸的尺寸,特殊的琴颈接合,新的513“小鸟”品记,新的更易使用的电路控制系统,包括Volume,Tone控制和两个刀口切换开关,一个是5向的拾音器切换开关,一个3向的模式切换开关,让您可以选择单线圈,干净的双线圈或者是重型双线圈模式。这是PRS最全面的型号,从尖叫的双线圈,到轻声吟唱的单线圈,只需要操作一个3向切换开关即可。

PRS 513 (玫瑰木琴颈+单片枫木贴面)
PRS 513 Artist(巴西玫瑰木限量款)
此款513是仅次于PRS private stock系列的最高配置,首先是艺术家标志性的极品贴面和渐变颜色搭配,无处不彰显着华丽气息。琴颈使用单片虎皮枫木纹路整齐,选料考究。最后就是富有传奇色彩的巴西玫瑰木指板,使音色更加均衡,延音很出色,枫木和玫瑰木的搭配使音色更加富有动态,更具有现代感。一句话总结:一琴在手,别无所求!